
IoT

Five Reasons Why the IoT Industry Needs to Embrace the Device Feedback Loop - Blog
February 18, 2022How often do you notice things like in this photo?
Debug & Test

Painless Multithreading: Five Easy Tips to Get Out of Debugging Hell - Story
December 06, 2021One of the more underappreciated aspects of a multithreaded RTOS application is that you cannot just look at the code to fully understand how the application works.
Software & OS
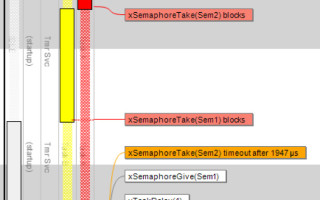
RTOS debugging, part 5: Deadlock ? when everybody wants the fork - Other
October 17, 2017A clear indication that you may have a deadlock problem is when multiple tasks suddenly stop executing, although no higher priority tasks are running.
Open Source

RTOS debugging, part 4: Priority inversion ? when the important stuff has to wait - Other
October 10, 2017As a developer, you have to watch out for programming pitfalls that can result in a higher priority task having to wait for a lower priority task ? this condition is known as priority inversion.
Open Source
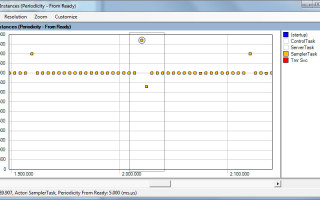
RTOS debugging, part 3: Chasing the jitter bug - Other
September 27, 2017The visible symptoms of jitter can be very similar to what you see in a system that suffers from CPU starvation, from general sluggishness to intermittent data loss or even malfunction.
Processing

RTOS debugging, part 2: Your tasks need that CPU; don?t starve them of it - Other
September 05, 2017In embedded systems using multitasking, you may run into a situation where some of your tasks run slowly or not at all. This is called task starvation.
Software & OS

RTOS debugging, part 1: Dealing with timing issues - Other
August 29, 2017There are several reasons that debugging an RTOS system is different from debugging a single-threaded ?superloop? system where you wrote all code yourself, but these are the top two.
Software & OS

RTOS in the IoT: Combating Complexity with Control - Story
October 24, 2016In the near future, almost everything will be connected to the Internet - at least, that's the vision for the Internet of Things (IoT). This vision...