How BASE-AU Enables High-Speed Optical Camera Links in Next-Generation Vehicles
March 05, 2026
Blog

The transition toward centralized and zonal vehicle architectures is placing new demands on how camera data is transported inside the vehicle. High-resolution optical cameras generate continuous multigigabit data streams that must be delivered reliably to domain controllers and central compute units. Existing in-vehicle network technologies, originally designed for lower data rates, are increasingly becoming a bottleneck.
This is where BASE-AU, the automotive-grade optical Ethernet standard defined under IEEE 802.3cz, comes into play.
ADAS Cameras and the Growing Data Transport Challenge
Modern vehicles integrate between 8 and 16 cameras, supporting applications such as surround view, mirror replacement, and cabin monitoring. These sensors have evolved from comfort features into safety-relevant components within ADAS and automated driving architectures.
To be effective, the video data generated by these cameras must be transported with high bandwidth and deterministic latency. As image resolutions and frame rates increase, the resulting data streams place significant demands on the physical layer. The communication link must support uncompressed video transmission, maintain reliable operation under harsh automotive environmental conditions, and span the longer distances introduced by centralized and zonal E/E architectures. BASE-AU was defined to address these requirements precisely.
Technical Characteristics of BASE-AU for Optical Camera Integration
Designed for Automotive Environments
BASE-AU is specified for automotive operating conditions, with components qualified for wide temperature ranges and vibration exposure. This supports deployment in typical camera mounting locations such as mirrors, bumpers, and behind the windshield.
Optimized for Long Optical Links
Using automotive-grade multimode fiber and defined link budgets, BASE-AU supports optical reaches up to 40 meters. This accommodates vehicle layouts where cameras are physically separated from ECUs or centralized compute units, including zonal E/E architectures.
Compact Integration
In contrast to pluggable SFP-based optical modules, BASE-AU transceivers are implemented as compact single-chip devices that can be integrated directly onto camera PCBs or ECUs. The devices support edge-mounted board-to-board and board-to-cable connectors, facilitating mechanical integration within constrained form factors. This enables implementation in camera modules with internal dimensions as small as 19 × 19 mm while reducing interconnect complexity at the system level.
Power Consumption
The transceiver dissipates no more than 1 W during bidirectional 10 Gb/s operation. Compared to equivalent high-speed electrical links, this corresponds to a reduction of approximately 30–50 % in power consumption. Lower dissipation directly eases thermal management requirements, particularly in sealed camera housings and compact ECU enclosures where heat removal is limited.
Low Latency
Camera-based systems performing real-time functions require a predictable and bounded communication delay. BASE-AU provides deterministic, low-latency data transmission suitable for time-critical automotive applications. The physical layer introduces communication latency below 1 µs, with end-to-end video latency under 18 µs at 10 Gb/s. At higher data rates, latency is further reduced due to the increased system clock frequency, supporting shorter response times in latency-sensitive functions.

Fig 1: Advantages of optical (IEEE Std 802.3cz) versus electrical coax cables for multigigabit data transmission in automotive camera applications
Industry Precedents: Migration from Copper to Optical Interconnects
The adoption of BASE-AU in automotive systems follows a transition previously observed in other high-bandwidth domains, where copper-based interconnects were progressively replaced by optical technologies to address scaling limitations.
In telecommunications networks, the shift from twisted-pair copper to fiber-optic infrastructure enabled substantial increases in bandwidth and transmission distance, supporting the growth of streaming services and cloud-based applications.
Similarly, data centers transitioned from copper interconnects to fiber for high-speed links between servers, switches, and storage systems. Optical interconnects made it possible to scale to multi-terabit aggregate throughput while maintaining low latency and improved energy efficiency.
In industrial automation, including aerospace and railway applications, fiber-optic links are deployed to maintain signal integrity and reliable data transmission under conditions of vibration, temperature variation, and electromagnetic interference.
Automotive architectures are now encountering comparable scaling constraints. Multigigabit data streams from cameras, lidar, and radar sensors, combined with increasing requirements for system reliability and availability, place limits on conventional copper-based interconnects. BASE-AU applies optical Ethernet technology to these constraints, providing bandwidth scalability and electromagnetic immunity within automotive-qualified implementations.

Fig 2: First optical camera by Leopard Imaging based on KD’s KD7251 transceiver and new hybrid connectors by Corning for 10GBASE-AU automotive Ethernet
BASE-AU in Automotive Backbone Architectures
Beyond sensor connectivity, BASE-AU can also be applied within the in-vehicle backbone network. The backbone interconnects zonal gateways, domain controllers, and centralized compute units across the vehicle platform.
In centralized and zonal E/E architectures, high-bandwidth data streams from multiple sensors must be aggregated and transported between processing domains. In this context, BASE-AU supports:
- High-speed optical links between zones and central compute units
- Redundant optical paths to support fail-operational network topologies
- Reuse of optical harness infrastructure across multiple data rates (10 Gb/s, 25 Gb/s, and up to 50 Gb/s)
With support for extended optical reach and inherent immunity to electromagnetic interference, BASE-AU links can be routed through the vehicle structure without susceptibility to coupling from high-voltage components or switching systems. This supports stable data transmission between zonal gateways and central compute domains, independent of the surrounding electromagnetic environment.
Compared to coaxial or shielded twisted-pair backbones, optical links reduce cable diameter and mass while enabling higher data-rate scalability over the same physical medium. In electric vehicle platforms, where harness weight and packaging volume directly affect system efficiency and integration constraints, these characteristics are particularly relevant.

Fig 3.1: Automotive BASE-AU camera connected directly to display via adapter board, interfacing with System-on-Chip (SoC)
KD725X BASE-AU Transceivers for Automotive Integration
The KD725X is a family of BASE-AU transceivers currently under development. The devices implement optical-to-electrical conversion for automotive Ethernet links and incorporate integration features aligned with automotive mechanical and system requirements.
Horizontal and Vertical Configurations
KD725X transceivers are offered in horizontal and vertical mechanical variants to support different integration scenarios. Vertical configurations are suited for camera module integration, while horizontal configurations facilitate implementation in backbone nodes or zonal gateways. Providing multiple mechanical orientations enables system designers to deploy a common transceiver architecture across different vehicle domains while accommodating packaging constraints.
Sensor Aggregation
The KD725X provides sensor aggregation capabilities via its internal SerDes interfaces. Multiple camera streams or sensor data channels can be multiplexed onto a single BASE-AU optical link, depending on system configuration and bandwidth allocation.
At the system level, aggregation enables:
- Reduction in cable count by consolidating multiple sensor connections onto a shared optical link
- Simplified ECU interfaces through concentration of sensor inputs
- Lower I/O power consumption and reduced PCB routing complexity compared to parallel electrical links
This approach supports scalable sensor architectures, particularly in applications such as mirror-replacement systems or cabin monitoring, where multiple video sources must be transported efficiently within defined bandwidth constraints.
Signal Replication for Redundant Network Topologies
The KD725X supports signal replication at the electrical interface. The deserialized output stream can be routed to a secondary transceiver, where it is re-serialized and retransmitted over an additional optical link.
At the architectural level, this capability enables:
- Implementation of redundant optical paths to support fail-operational communication strategies
- Realization of loop-through or ring-based topologies in zonal or distributed ECU configurations
- Access points for validation, monitoring, or diagnostics without interrupting the primary link
By enabling signal redistribution at the transceiver level, the device supports flexible network topologies while maintaining compatibility with BASE-AU physical-layer operation.
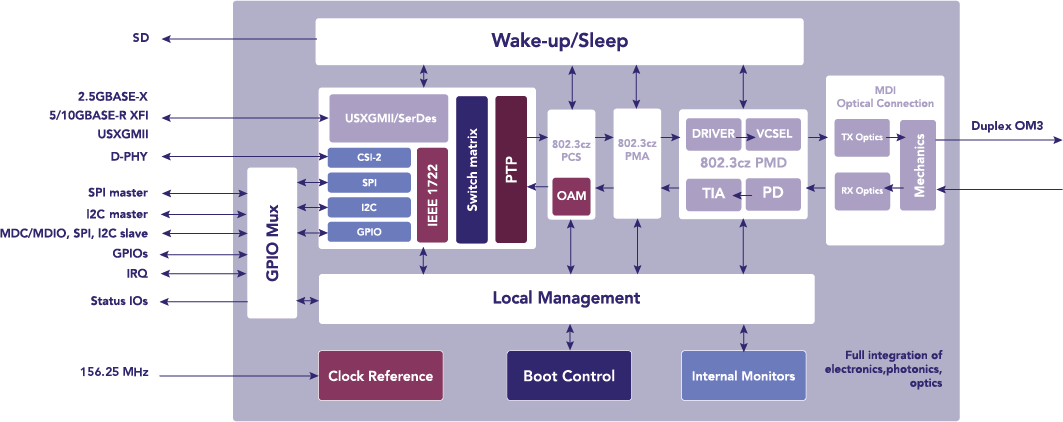
Fig 3.2: Block diagram of the automotive transceiver KD7251 supporting multi-gigabit operation at 2.5, 5, and 10 Gb/s, designed for high-speed in-vehicle data communication
Conclusion: Optical Ethernet for Scalable Automotive Architectures
High-resolution camera systems impose stringent requirements on in-vehicle data transport, including bandwidth scalability, deterministic latency, electromagnetic robustness, and packaging efficiency. BASE-AU addresses these constraints through an automotive-qualified optical Ethernet physical layer designed for both sensor links and backbone connectivity.
From camera modules to zonal gateways and centralized compute units, BASE-AU supports multigigabit data transmission over extended distances while reducing susceptibility to electromagnetic interference and enabling scalable network topologies. As sensor resolutions and data rates continue to increase, optical physical layers provide a viable path for maintaining performance and architectural flexibility within future vehicle platforms.
Pablo Blázquez is Business Development Manager Europe at KD, where he leads strategic growth initiatives for optical transceivers in automotive Ethernet. With a solid background in automotive electronics and in-vehicle communications, Pablo has worked closely with OEMs and Tier 1 suppliers to bring cutting-edge connectivity solutions to market.

Pablo Blázquez is Business Development Manager Europe at KD, where he leads strategic growth initiatives for optical transceivers in automotive Ethernet. With a solid background in automotive electronics and in-vehicle communications, Pablo has worked closely with OEMs and Tier 1 suppliers to bring cutting-edge connectivity solutions to market.